In the past few months, I have been writing thousands of lines of code to bring the boat to life. The boat can be controlled from a web browser over wifi and the program can be uploaded remotely. It’s useful for testing when the boat is close to the shore. I attach pictures of a simple user interface for route planning and reading sensor data such as:
- Compass heading and GPS position
- Wind direction
- Pitch and the angle of heel
- Voltage and power output of individual solar panels: three on the hull and two on the sailwing
- Voltage and current of all batteries: main, backup and one inside the sailwing
- Flood sensors in both hull compartments
- Temperature inside the electronics housing and inside the sailwing, battery and water temperature
Now that all sensors are tested, I’m finally going to join the hull parts together and apply an antifouling paint. It will be finished in less than a week!
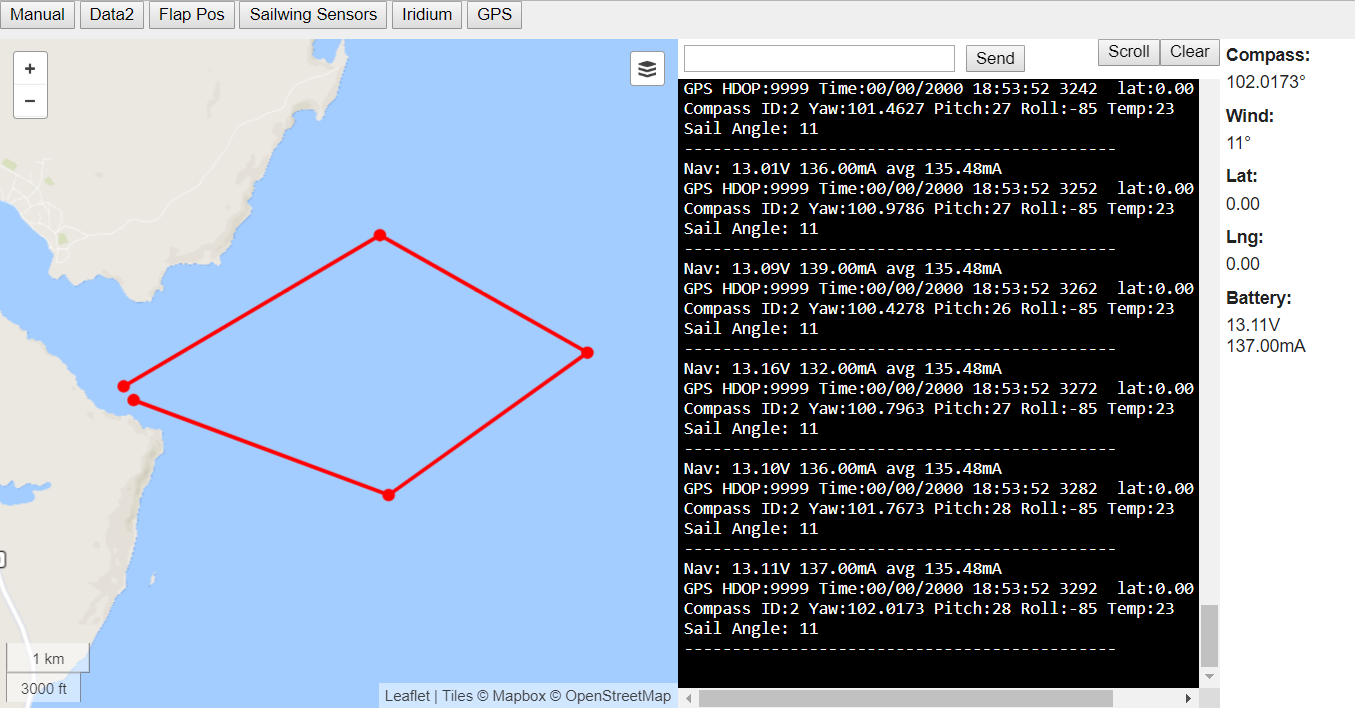
In autonomous mode, the boat will follow waypoints that are being set by clicking on the map. The program is constantly reporting messages with sensor data for debugging.
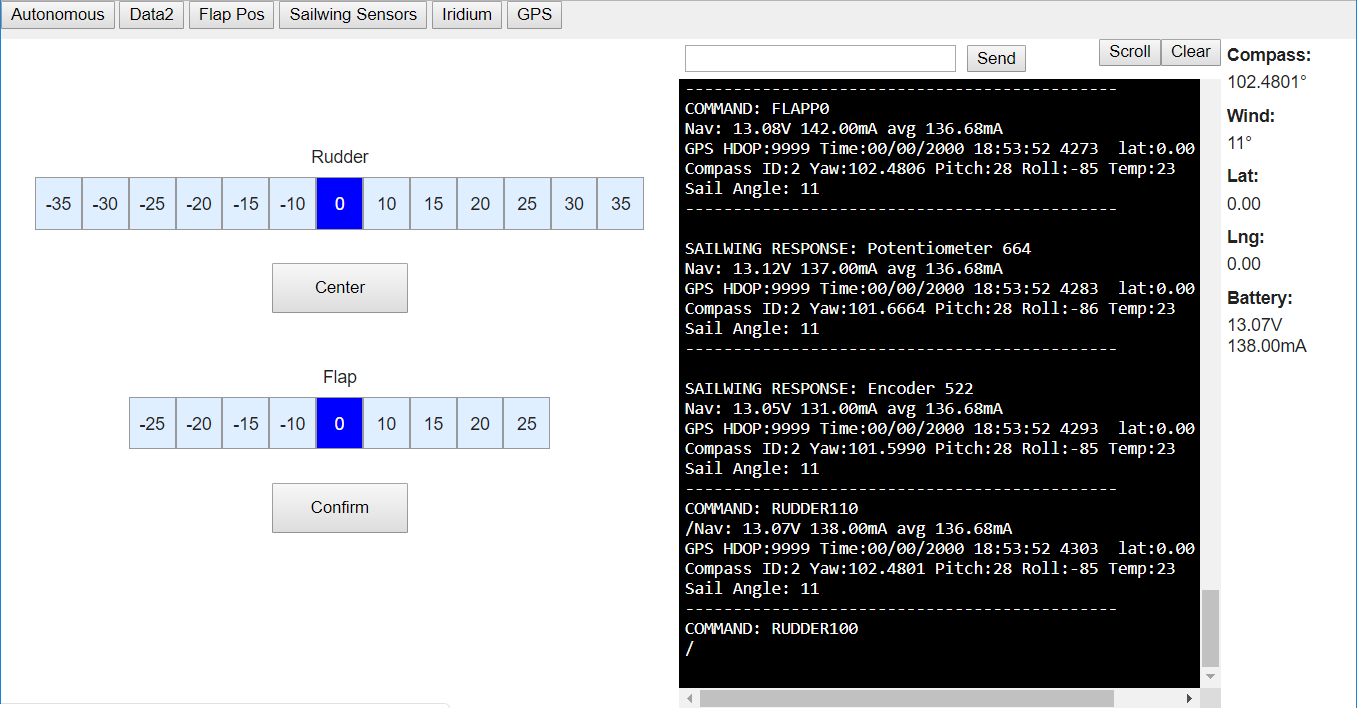
In manual mode, the rudder and sailwing flap can be set at a specific angle. I want to experiment with different angles and get some feeling how the boat reacts.
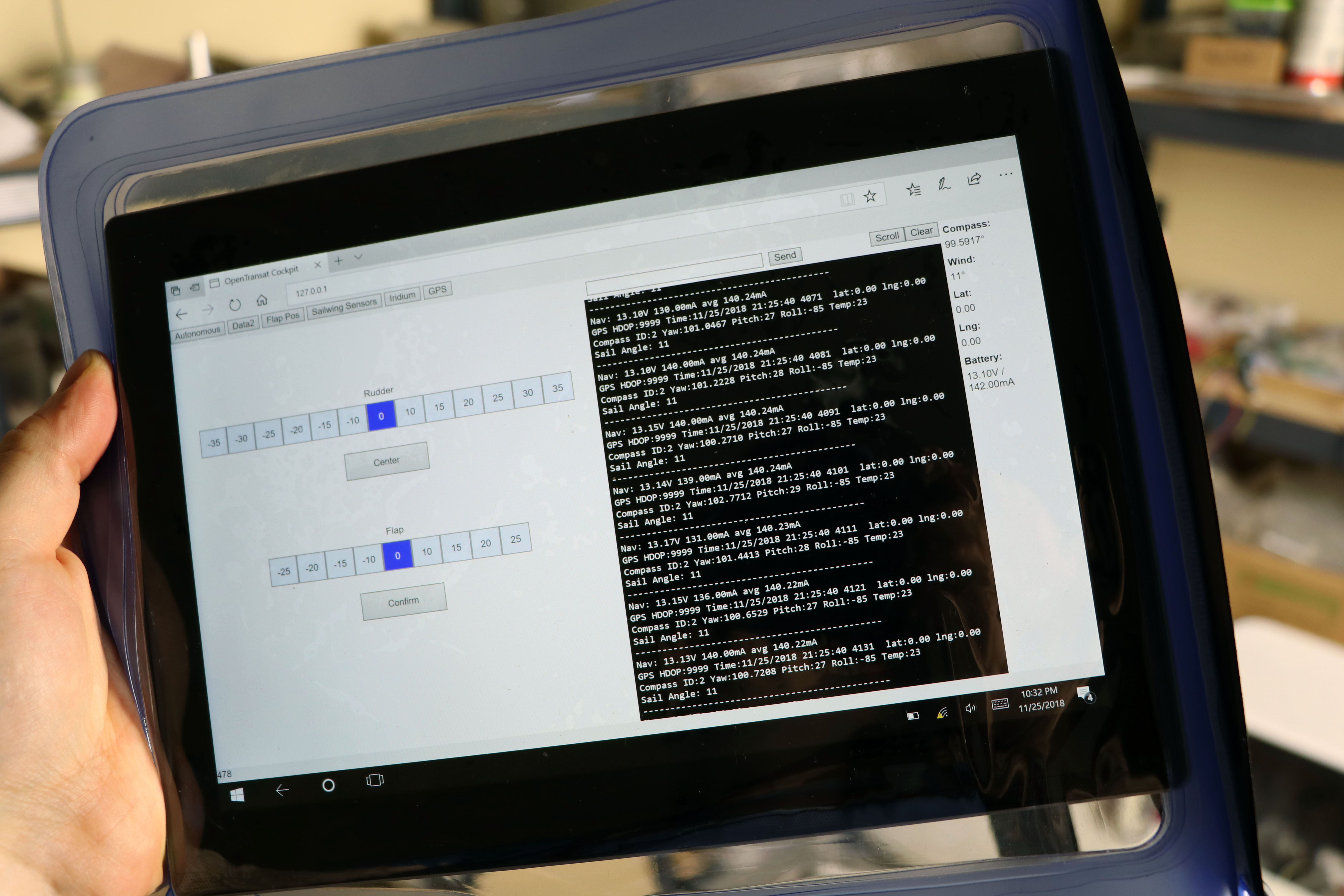
When testing the boat in the water, I will control it from a powerboat using a waterproof tablet.