The sailwing is now equipped with a flap that is turned by the waterproof actuator. The beauty of this concept is that it requires a small force to adjust the sailwing even in high winds. Here’s a video of the actuator in action:

I decided to move the actuator higher than in the original design as it’s prone to entanglement. Also the flap shape was improved to minimize the contact with water when the boat heels. The boat will become uncontrollable at a 40-degree angle of heel as the flap will reach the water level. This will theoretically happen in very high winds (> 30 knots), but I must find it out empirically using a powerful fan.


The shaft is made from a stainless steel rod threaded only on the end. There’s a plastic bushing that minimizes friction.
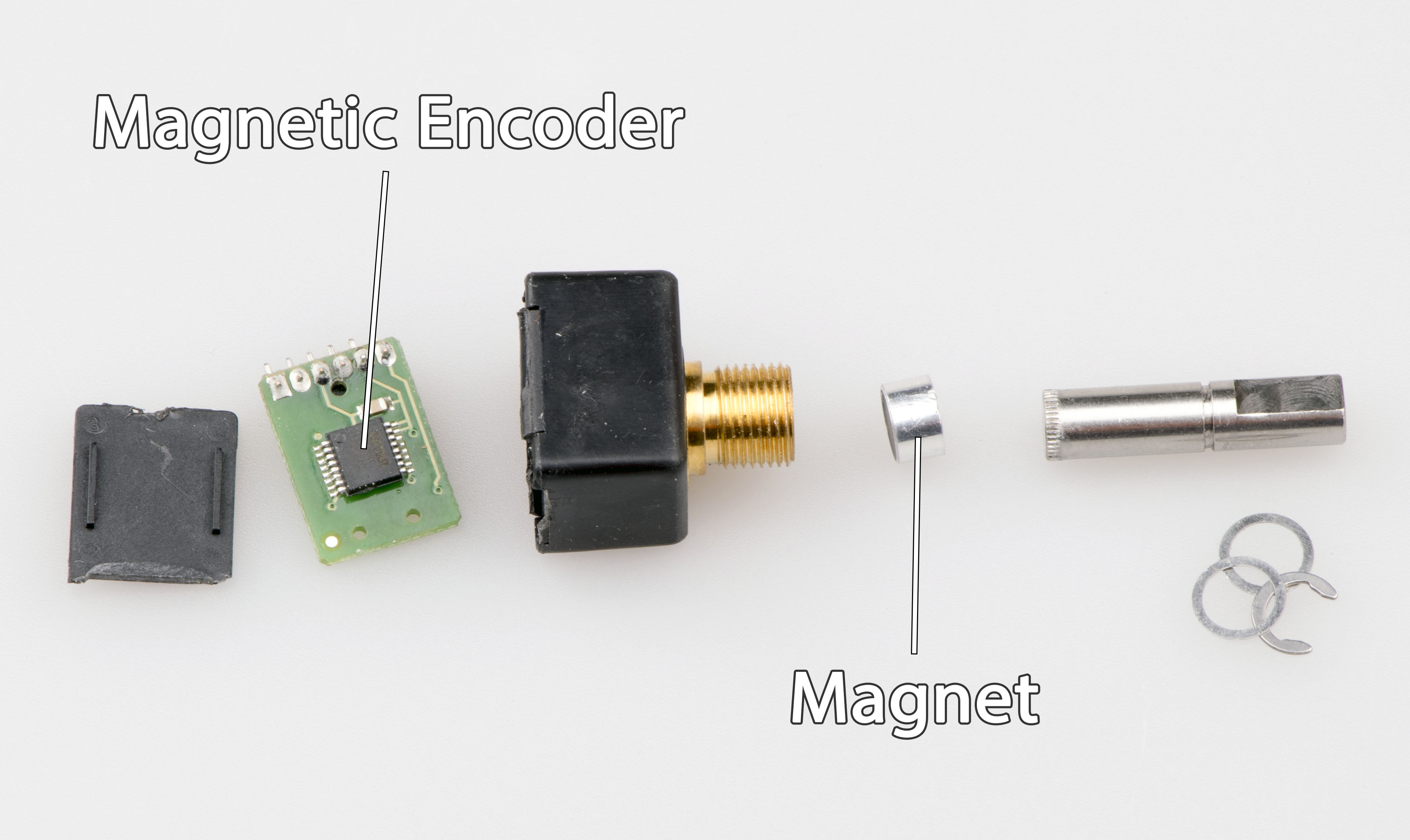
Although the actuator has its own position feedback, there is a need for a more reliable position sensor. I teared down the same magnetic encoder I used for the rudder and here’s what’s inside…

I attached the magnet to the end of the flap shaft. Wow, the magnet fits precisely into the M6 nut after the nylon collar is removed! That was an easy job.
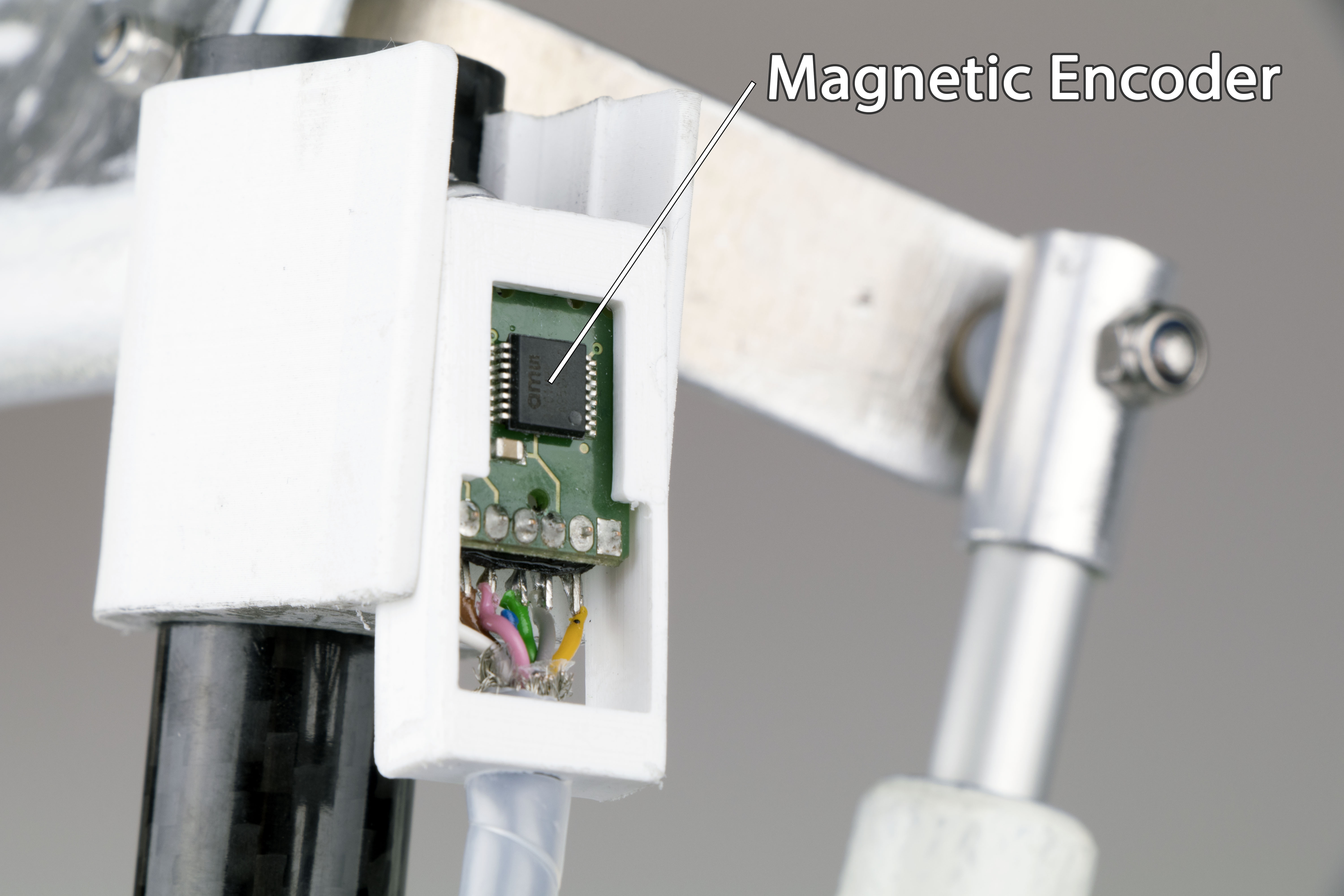
I made a 3D-printed housing for the encoder PCB that holds it right above the rotating magnet. The PCB will be potted with a heat-conductive epoxy.
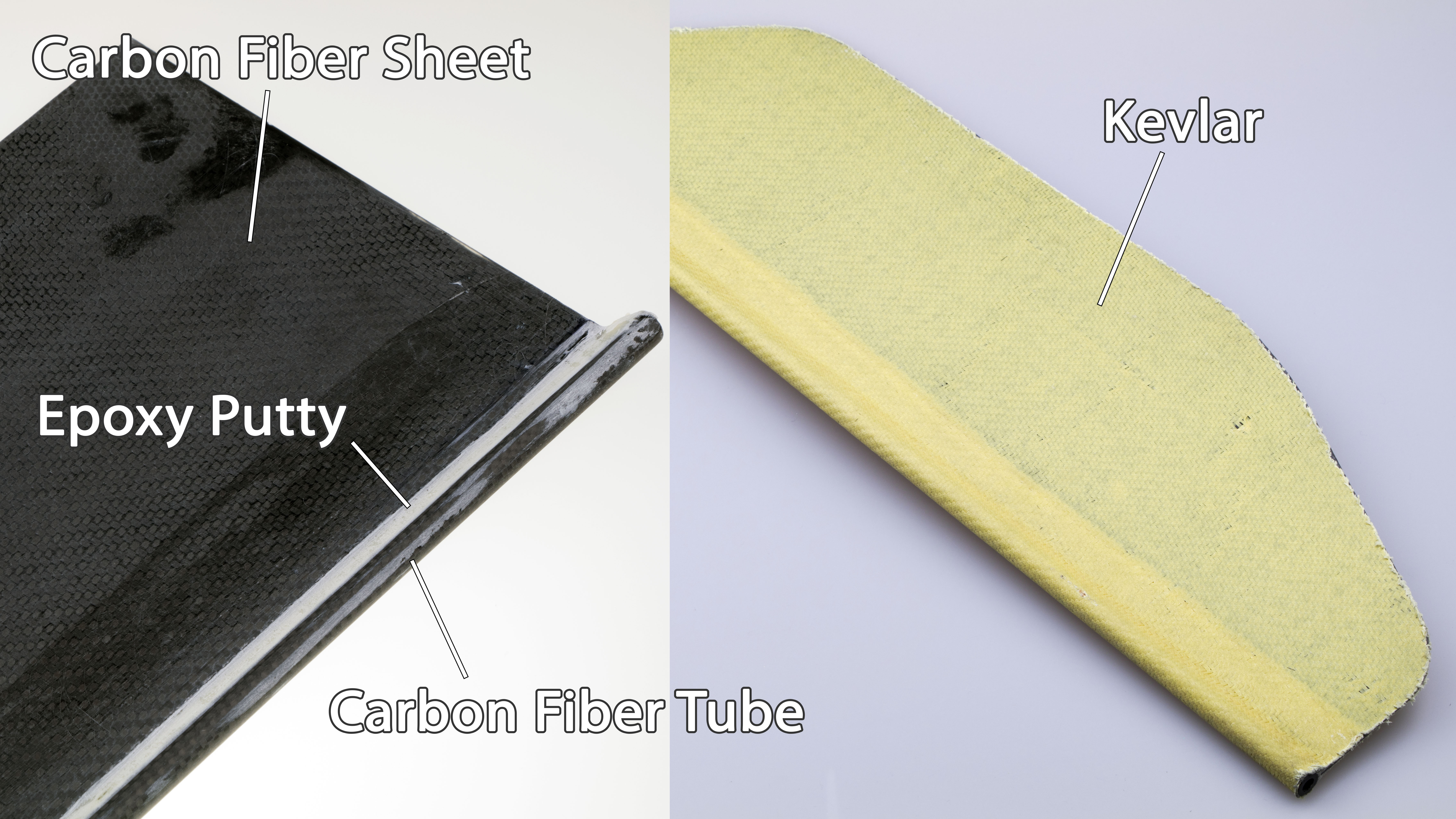
The flap was made from a 1-mm carbon fiber sheet glued to a carbon fiber tube and wrapped with Kevlar. The result is a lightweight and semiflexible material. Semiflexibility helps saving the actuator from occasional water impacts.